Kontakt

Prof. Dr.-Ing.
Tamara Bechtold
Tel. 04421 985-2564
Jade Hochschule
Friedrich-Paffrath-Straße 101
26389 Wilhelmshaven
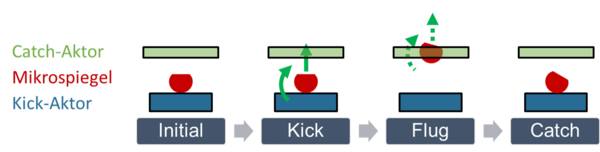
Kick and Catch - kooperative Mikroaktoren für frei bewegliche Plattformen
Das Ziel dieses Forschungsvorhabens sind neuartige Mikroaktuatoren, die nicht gelagert, sondern frei beweglich sind. Zudem sollen sie Energie sparen, große Verfahrwege bieten und auch schnell sein. Um dies zu ermöglichen, müssen verschiedene Typen von Aktuatoren miteinander kooperieren. Um hohe Geschwindigkeiten und große Auslenkungen zu ermöglichen, soll die Masse einem plötzlichen Stoß (Kick) ausgesetzt werden und in eine Freiflugphase eintreten. Anschließend wird diese Masse in einer definierten Endposition aufgefangen (Catch).
Die Forschungsgruppe für Modellierung und Simulation mechatronischer Systeme unter der Leitung von Prof. Bechtold bringt ihre Expertise in der Computer-Simulation und Modellordnungsreduktion ein. Die Computer-Simulationen ermöglichen Vorhersagen des Verhaltens der komplizierten Mikroaktoren und sparen somit Entwicklungskosten, da weniger teure Prototypen erforderlich sind.
Universität Freiburg
Institut für Mikrosystemtechnik
Prof. Ulrike Wallrabe
Georges-Köhler-Allee 102
79110 Freiburg
Ruhr-Universität Bochum
Lehrstuhl Mikrosystemtechnik
Prof. Martin Hoffmann
Universitätsstraße 150
44801 Bochum
Universität Augsburg
Lehrstuhl für Regelungstechnik
Prof. Christoph Ament
Eichleitner Straße 30
86159 Augsburg
Mitarbeiter
Arwed Schütz, M.Eng.

Tel: 04421 985-2774
✉ E-Mail
Raum L 135