Entwicklung innovativer Technologien für autonome maritime Systeme (EITAMS)
Die zunehmende Nutzung maritimer Ressourcen durch die deutsche Wirtschaft erhöht den Bedarf an zuverlässigen Werkzeugen zur Überwachung und Wartung der Anlagen in einer für Mensch und Technik feindlichen Umgebung. Im Zuge der intensiveren Nutzung müssen zudem auch die hochsensiblen und geschützten marinen Biotope wie zum Beispiel das Wattenmeer in der Deutschen Bucht zuverlässig überwacht werden. Es bedarf es daher effektiver Technologien und sicherer Methoden zur Zustandserfassung von Umwelt und Technik, wie sie nur durch autonome und ferngesteuerte Wasserfahrzeuge und -roboter ausgeführt werden können.Das im Juni 2021 abgeschlossene Projekt EITAMS hatte sich zum Ziel gesetzt, innovative Technologien zum sicheren und effektiven, aber auch kostengünstigen Einsatz solcher Fahrzeuge zu entwickeln und diese an einem Demonstrator zu erproben.

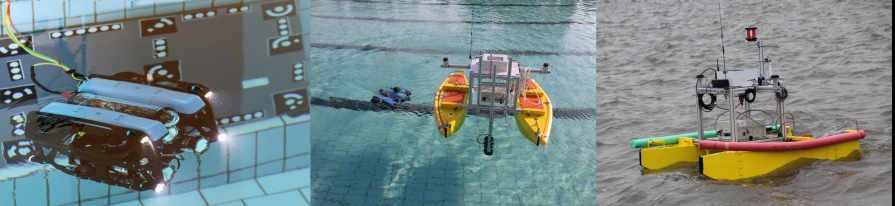
Das in Abb. 1 dargestellte Konzept besteht aus einem autonom operierenden Überwasserfahrzeug (USV) und einem Schwarm selbstständig fahrender Unterwasserfahrzeuge (AUV), die alle zur Erfüllung der Gesamtaufgabe kooperieren. Die AUV können mit an die jeweilige Aufgabe angepassten Sensoren versehen werden; sie übertragen kontinuierlich Sensor- und Zustandsdaten an das USV. Der AUV-Schwarm kann an verschiedenen Stellen gleichzeitig Messungen durchführen und damit Aufgaben schneller als ein Einzelfahrzeug lösen. Die dabei geringere Zahl der für die einzelnen AUV notwendigen Messfahrten schont zudem deren Energievorräte.
Das USV übernimmt viele Aufgaben, die herkömmlich von einer Landstation oder einem Begleitschiff übernommen werden. Es bestimmt die Positionen der AUV, georeferenziert sie durch ein integriertes Echtzeitkinematik-GPS (RTK) und stellt diese Daten den einzelnen Fahrzeugen für Steuerung und Navigation zur Verfügung. In dieser Anordnung kann das Gesamtsystem den Schwerpunkt seiner Operationen bei Bedarf selbständig verschieben. Der Schwarm kann insbesondere durch den Einsatz intelligenter Algorithmen viele Aufgaben sehr viel effektiver als Einzelfahrzeuge erfüllen und damit in wissenschaftlicher und wirtschaftlicher Hinsicht neue Untersuchungs- und Marktfelder eröffnen.

Ausgehend von Erfahrungen vorangegangener Pilot-Projekte fokussierte sich das Forschungsprojekt auf die folgenden Themenschwerpunkte maritimer autonomer Systeme:
- Verbesserung der Unterwassernavigation
- Anwenderfreundliche Planungsverfahren
- Hochgenaue Zielpunktansteuerung
- Modulare Systemarchitektur und adaptive Steuerung/Regelung
- Reduzierung des Verlustrisikos
Zur Umsetzung gliedert sich das Projekt EITAMS in fünf Teilprojekte, die in enger Zusammenarbeit der Fachbereiche Seefahrt und Logistik in Elsfleth, Ingenieurwissenschaften in Wilhelmshaven und Bauwesen, Geoinformation, Gesundheitstechnologie in Oldenburg bearbeitet wurden. Um nachhaltig wissenschaftlichen Nachwuchs zu fördern, wurden Doktoranden/innen der Promotionsprogramme Sichere Automatisierte Maritime Systeme (SAMS) und Jade2Pro in das Projekt eingebunden.
Wie die Beschreibungen der Teilprojekte zeigen, wurden alle wesentlichen wissenschaftlichen Ziele des Projekts erreicht und in einer Vielzahl von Veröffentlichungen dokumentiert. Das Projekt EITAMS ist seinem Auftrag zum Technologie- und Wissenstransfer auf vielfältige Weise nachgekommen. Neben einer Präsentation auf der Hannovermesse wurden mehrere Tagungen, die sich an Forschungseinrichtungen und Kooperationspartner oder Anwender aus der maritimen Verbundwirtschaft und Behörden richteten, durchgeführt. Dabei entwickelte sich eine enge Verzahnung von EITAMS mit dem Projekt „Kompetenzzentrum GreenShipping Niedersachsen“ (GSN), die sich z. B. in dem gemeinsam mit dem Maritimen Cluster Norddeutschland durchgeführten Workshop „Forum Maritim – Workshop Intelligente und kooperierende Unterwasser-Sensorsysteme" widerspiegelt. Auch die allgemeine Öffentlichkeit wurde mit Pressemitteilungen, Informationsständen und eigenen Veranstaltungen über das Projekt informiert. Die positiven Reaktionen auf das Projekt EITAMS zeigen, dass die Forschung an der Jade Hochschule einen signifikanten Beitrag zur regionalen Entwicklung leistet.
| Projektleiter | Prof. Dr. Klaus-Jürgen Windeck |
| Teilprojektleiter | Prof. Dr. Thomas Brinkhoff Prof. Dr. Christian Denker Prof. Dr. Holger Korte Prof. Dr. Thomas Luhmann Prof. Dr. Lars Nolle Prof. Dr. Frank Wallhoff |
| Projektvolumen | 1.679.754 € |
| Fördermittelgeber | Niedersächsisches Ministerium für Wissenschaft und Kultur - VW-Vorab/Wissenschaft für nachhaltige Entwicklung |
| Projektlaufzeit | 01/2017 – 06/2021 |