Contact

Prof. Dr.-Ing.
Tamara Bechtold
Tel. +49 4421 985-2564
Jade University of Applied Sciences
Friedrich-Paffrath-Straße 101
26389 Wilhelmshaven
Germany
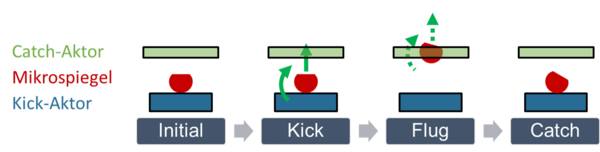
Kick and Catch - cooperative microactuators for freely moving platforms
The aim of this research project is to develop new types of microactuators that are not mounted on bearings but can move freely. In addition, they should be energy-efficient, offer long travels and operate fast. Different types of actuators must cooperate with each other to achieve these goals. To enable high speeds and large deflections, the mass should be subjected to a sudden impact (kick) and enter a free-flight phase. Finally, this mass is caught in a defined final position (catch).
The Research Group for Modeling and Simulation of Mechatronic Systems (MSMS) under the guidance of Prof. Bechtold contributes its expertise in computer simulation and model order reduction. The computer simulations predict microactuator's complicated behavior and thus save development costs, since fewer expensive prototypes are required.
University of Freiburg
Department of Microsystems Engineering
Prof. Ulrike Wallrabe
Georges-Köhler-Allee 102
79110 Freiburg
Ruhr University Bochum
Chair for Microsystems Technology
Prof. Martin Hoffmann
Universitätsstraße 150
44801 Bochum
University of Augsburg
Chair for Control Theory
Prof. Christoph Ament
Eichleitner Straße 30
86159 Augsburg
